
Real Time Kinematic (RTK) ist eine Technik zur Verbesserung der Genauigkeit von Positionsdaten, die von globalen Satellitennavigationssystemen (GNSS) wie GPS, GLONASS, BeiDou oder Galileo stammen.
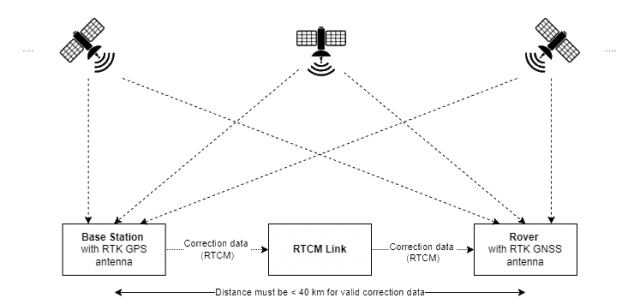
Um eine Positionsgenauigkeit von ±1cm zu erreichen, werden sogenannte Korrekturdaten verwendet, die von einer (in der Regel ortsfesten) Basisstation erzeugt werden. Die Korrekturdaten sind im Wesentlichen die Differenz zwischen einer genau bekannten und einer aktuell erfassten GPS/GNSS-Position der Basisstation und werden durch ionosphärische Fehler verursacht und sind somit für die GPS/GNSS-Positionsabweichungen zwischen tatsächlicher Position und erfasster Position der GPS/GNSS-Empfänger verantwortlich. Die Fehler betreffen alle GPS/GNSS-Signale in einem bestimmten Gebiet (~ Radius 20 km um die Basisstation) gleichermaßen.
Über den RTCM-Link werden die Korrekturdaten der RTCM (Radio Technical Commission for Maritime Services) von der Basisstation zu den sich bewegenden GPS/GNSS-Empfängern, den sogenannten Rovers, übertragen. Durch die interne Anwendung der Korrekturdaten in den Rovers auf die empfangenen GPS/GNSS-Positionen wird die Positionsgenauigkeit der Rovers auf ±1 cm reduziert.
| Base Station | GPS/GNSS-Empfänger zur Erfassung der Korrekturdaten |
| RTCM Link | Medium zur Übertragung des Korrekturdatenstroms von der Basisstation zum Rover |
| Rover | Beweglicher GPS/GNSS-Empfänger, der die Korrekturdaten verwendet, um die Genauigkeit der Positionsdaten auf bis zu (±1cm) zu erhöhen! |
RTK Anwendungen
Die 2D-RTK-Module (2D-RTK-Basisstation & 2D-RTK-Rover) können aufgrund ihrer sehr kleinen und robusten Bauweise und der über Kabel verbundenen Antennen auch sehr gut in Anwendungen mit sehr begrenztem Bauraum eingesetzt werden. Durch den Einsatz von bis zu zwei Antennen auf einem Rover oder den Einsatz mehrerer einzelner Rover in Verbindung mit der 2D-Analysesoftware lassen sich vielfältige Anwendungen realisieren!
Automotive
- Tests und Validierung von Fahrerassistenzsystemen (ADAS): Mit zwei individuellen 2D-RTK-Rovern (zwei Antennen auf zwei Fahrzeugen) kann der Richtungsvektor zwischen ihnen mit 1 cm Genauigkeit bis zu 250 km/h berechnet werden, dank des 2D-eigenen GPS/GNSS
- Positionskorrekturalgorithmus, z.B. für die Validierung eines aktiven Tempomats.
- Schlupfwinkel: Bei Rover mit zwei 2D-RTK-Antennen (zwei Antennen an einem Fahrzeug) kann der Richtungsvektor zwischen ihnen mit 1 cm Genauigkeit bis zu 250 km/h berechnet werden, dank 2Ds proprietärem GPS/GNSS-Positionskorrekturalgorithmus, z.B. für Gleitwinkelberechnungen
- Neigung/Neigung des Fahrzeugs während der Fahrt: Mit Rover mit zwei 2D-RTK-Antennen (zwei Antennen an einem Fahrzeug)
- Vollständige dreidimensionale Verfolgung der Fahrlinie
Racing
- Hochgenaue Fahrlinienanalyse
- Berechnung der Entfernung zum Scheitelpunkt
- Berechnung der Streckenbegrenzung
- Erkennung der Sprunghöhe (Motocross)
Industrial
- Biegung von Kranauslegern unter Last
- Positionierung von Lasten (Schiffe, Gabelstapler, Kräne, …)
- Schiffsbeladung
- Autonome Fahrzeuge
Downloads
Links